
Professional Summary
A condensed area about more projects, videos, resume, and publications!
My name is Charlie Hanner, and I am a doctoral candidate at the University of Maryland’s Space Systems Laboratory where my research focuses on robots, rovers, and habitation in the pursuit of exploration. From operating robotic manipulators underwater in our Neutral Buoyancy Research Facility to fabrication of robots and planetary rover analogues, I try to bring my hands-on skills to the research plane to make affordable, on-time solutions to our engineering problems. This page serves as a selected summary of my work to date including my publications, various coding projects, and a few highlighted videos from my YouTube channel where I attempt to document and share parts of my engineering journey.
Project Highlights
Please find below three selected projects that I believe showcase my skills as an engineer the best and links to further details about each!
VERTEX/BioBot
This is the project that I have contributed the greatest amount of time, and have been able to showcase my evolving skills over the course of my time at the laboratory! In this project, I co-designed an Earth-analogue lunar roving vehicle, and lead the manufacturing and assembly of both the rover and the 5-meter long umbilical tending arm that sits atop it. This project aims to do Earth-based research in lightening the astronaut’s load on the Artemis mission series!
Read about it in Maryland Today!


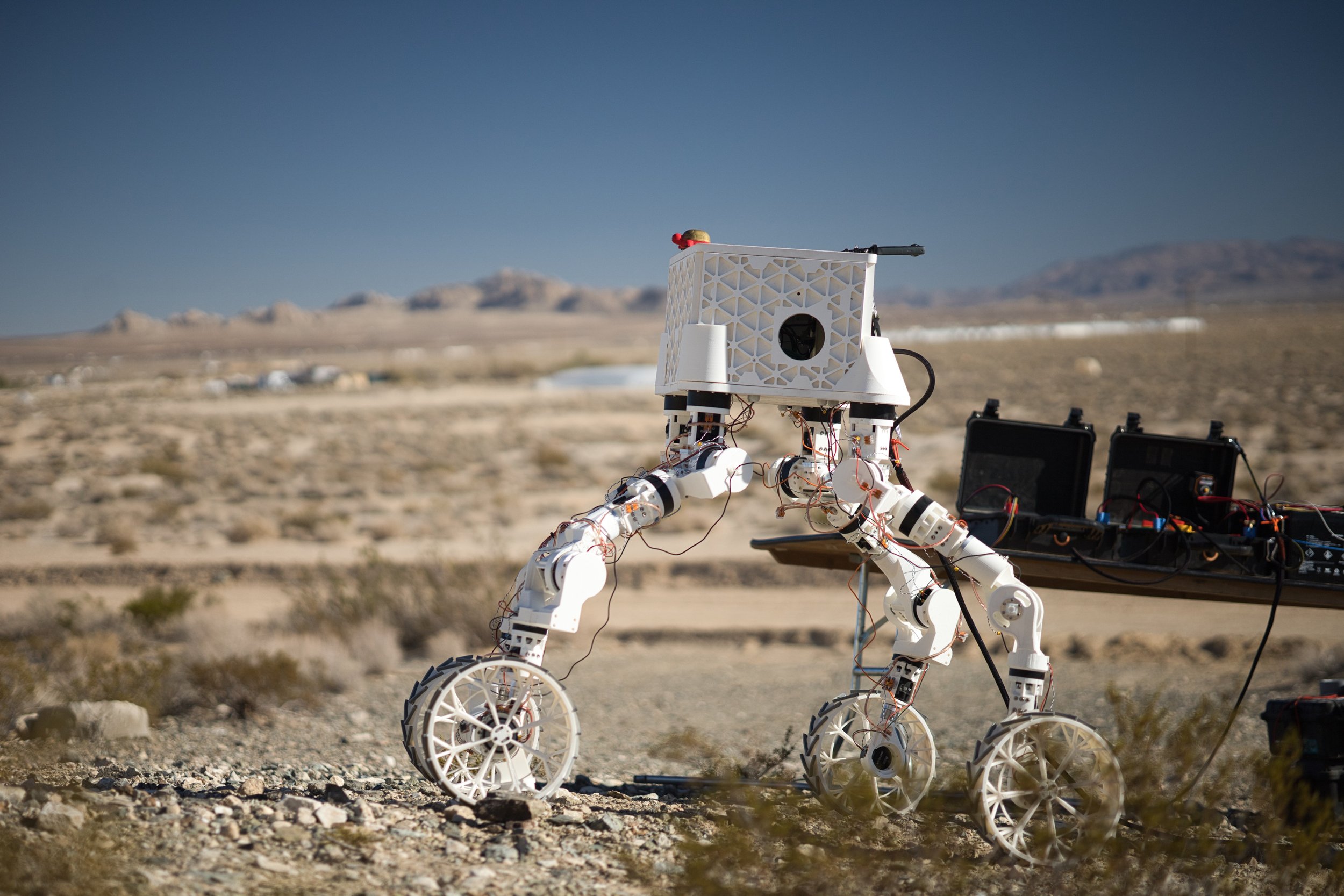
TRAVELS
TRAVELS is a 3D printed wheel-on limb lunar roving vehicle concept designed, printed, built, and tested in-house (and in JPL’s deserts) for the 2022 BIG Idea Challenge. I was a hardware design team member/mentor and as the project evolved became the manipulator assembly and repair technician! Fantastic team and a wonderful high-paced engineering experience!
Read about it in National Geographic!
https://www.nationalgeographic.com/science/article/lunar-robot-snakes-explore-the-moon-nasa

Ranger
I originally joined the SSL as a SCUBA diver, and have been fortunate to spend hundreds of hours underwater both in human-factors related studies and in being the lead underwater operator of a 7-DOF manipulator (Ranger) performing simulated grapple and berthing operations for satellite servicing! From coordinating dive operations to leading safety/test plans, briefs, and operating as lead-diver, my responsibilities are spread across the wide gamut of necessities required to perform these tests. Time in the water of the NBRF always constitutes the best days of the year!


Publications
Please find below a list of my publications to date and links to their hosting. I will update this list as my publications become linkable, and keep a running list of my expected upcoming publications:
Submission currently preparing for Journal of Aerospace Engineering or Acta Astronautica
Initial Suspension Evolution and Molding Path of Large Range of Motion Independently Articulating Suspension for Extraterrestrial Roving Vehicles (Working title)
Submission currently preparing for Elsevier Mechatronics
Independently Articulated Roving Vehicle Suspension System Dynamics Modeling and Validation
AIAA ASCEND 2024 - Field Testing of Artemis Roving System Concept to Reduce On-Suit PLSS Mass - Publication Link
ICES 2024 - Initial Testing and Evaluation of the BioBot EVA Support System - Publication Link
ICES 2024 - Design, Fabrication, and Evaluation of the MX-D Spacesuit Simulator - Publication Link
AIAA ACEND 2023 - Earth-Analogue Roving System Development and Testing for Lunar Surface Exploration - Publication Link
ICES 2023 - Development and Testing of Crew Interfaces for an Advanced Unpressurized Exploration Rover - Publication Link
AIAA ASCEND 2022 - Small Dexterous Space Manipulators: Technology Development and Mission Applications - Publication Link
AIAA ASCEND 2022 - TRAVELS: A Multimodal Mobility Concept for Highly Capable Planetary Traverses - Publication Link
ICES 2022 - Development and Testing of the BioBot EVA Support System - Publication Link
ICES 2022 - Experimental Investigation of Minimum Cabin Sizes at Varying Gravity Levels - Publication Link
ICES 2021 - Design and Development of an EVA Assistance Roving Vehicle for Artemis and Beyond - Publication Link
ICES 2021 - Experimental Investigation of Minimum Required Cabin Sizing in Varying Gravity Levels - Publication Link
ICES 2018 - Experimental Investigation of Vertical Translation Design Commonality Across Differing Gravitation Levels - Publication Link



Python Projects
These projects stemmed from personal interest in both the topic and in developing my Python skills! My GitHub Profile
Asteroid Accessibility Study
This chart compares the accessibility of NEAs to various Martian trajectories in the coming years. The code was written to be updated every day with the latest asteroids in NASA’s NHATS database, and and these updates are automatically published daily on my GitHub page: Asteroid Updates Page
This work was featured! NHATS Accessibility Study - Small Bodies Assessment Group Science Nuggets - see “2022 June 6” entry: Link to SBAG Page

Machine learning for robot joint torque and position prediction
This is an ongoing, spare-time research venture headed by myself and Nicolas Bolatto where we attempt to create machine learning algorithms to predict output torque and position of a Harmonic Drive gear unit using strain gauges. My efforts focused on the torque prediction side, and looks like with a greater amount of automated training data could produce a viable result! See the linked paper below for our experimental evolution and the evolution stages of the created models:

Automated Asteroid Twitter Discovery Accounts
The importance of asteroid discovery, categorization, and general preparedness cannot be understated. After learning about the asteroid discovery process, I was motivated to create a tool that spreads awareness to large numbers of people about the asteroid discovery rates and the importance of upcoming missions like NEOSM
Unfortunately due to the evolution of Twitter/S, I decided to pause the updates tweeting live there. I am still working either find a new platform to share this with, or possibly set up a new server that will publish the info daily to my GitHub page (even though this is not a medium with high viewership). I still am proud of the work I did for it, and hope to find an alternate solution!