Ranger
A satellite-servicing robot testing and researching for NASA’s first On-orbit Servicing, Assembly, and Manufacturing mission (OSAM-1)
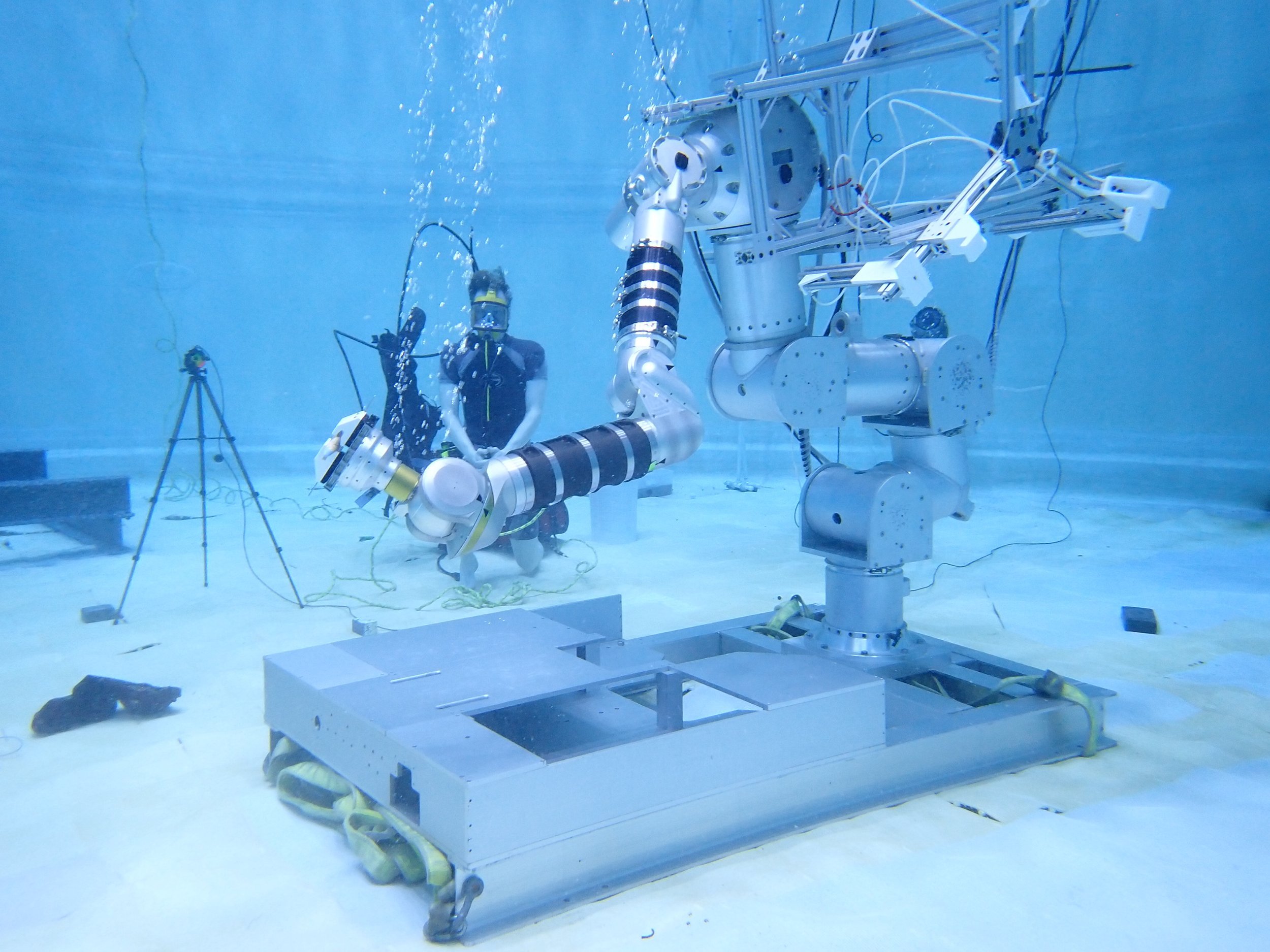
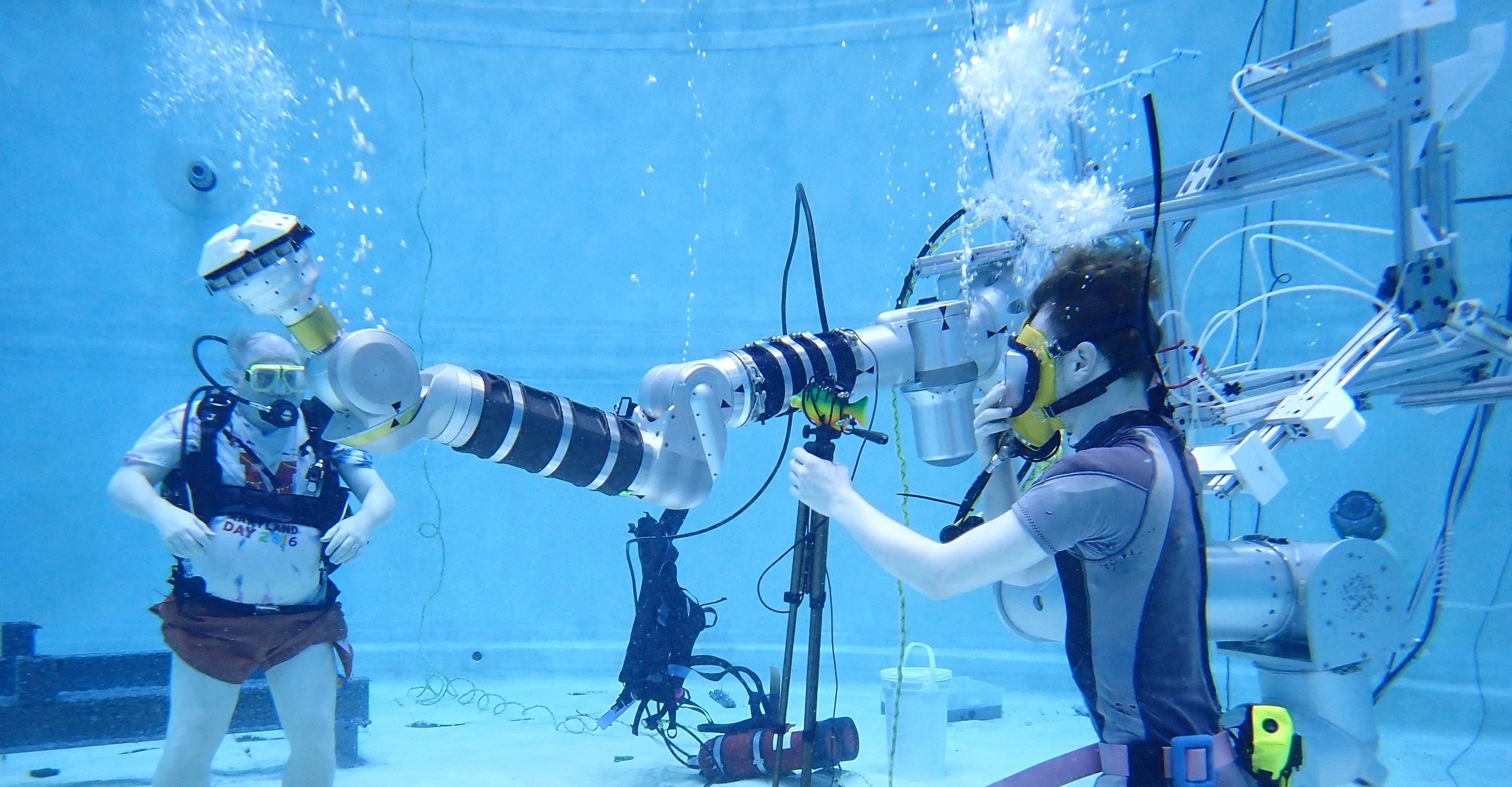
Ranger is the dexterous manipulator component of the SSL’s RTSX (Ranger Telerobotic Shuttle Experiment) and is the manipulator shown in the photos on this page. The ultimate RTSX configuration has two dexterous manipulators (named “Dex. Manip. Right” (DXR) and “Dex. Manip. Left” (DXL)) similar to human arms, atop a positioning leg (PXL) for ultimate mobility in satellite servicing operations. Ranger is currently in the transition process between second and third generation hardware, and testing in my time at the SSL has been focused on single arm tasks. In this time, my contributions to Ranger have largely surrounded testing plans/operations/experimentation setups, debugging, manipulator component/test rig manufacturing and actuator repairs.



Testing operations:
As lead underwater robot operator, most of my Ranger tests involve the manipulation of an inertially equivalent satellite mockup underwater in our Neutral Buoyancy Research Facility. During my time at the SSL, Ranger’s main task was to support NASA’s OSAM-1 mission largely around trajectory generation and execution in simulated microgravity. Specifically, Ranger was tasked with executing a grapple procedure to positively capture an inertially-equivalent mockup to the LandSat 7 satellite, perform attitude orientation adjustments, and translationally berth the mockup to an attached berthing mechanism mockup just as the OSAM-1 mission intended to. This video shows this procedure from NASA that we studied different aspects of such as changes in orientation, relative position, grapple failure and subsequent re-grapple, and more.
My position for these tests is most commonly underwater testing director and robot operator which includes leading:
On deck:
Testing infrastructure design/organization and testing plan generation
Pre- and post- dive safety, communication, and testing briefs
Disassembly and electrical repairs
Personnel staffing
Underwater:
Diver workload management
Ranger entry/exit coordination from water
Pressurization and joint checks upon entry
UW robot operator (alongside a surface operator):
Manipulator calibration
Trajectory generation and joint-space articulation on the fly in unexpected/tricky circumstances
Grapple fixture adjustment and parallel jaw mechanism repair upon failures
Anomaly management including joint, testing infrastructure, and pressurization failures
Testing also occurs on land, such as seen in the video linked below!