
TRAVELS
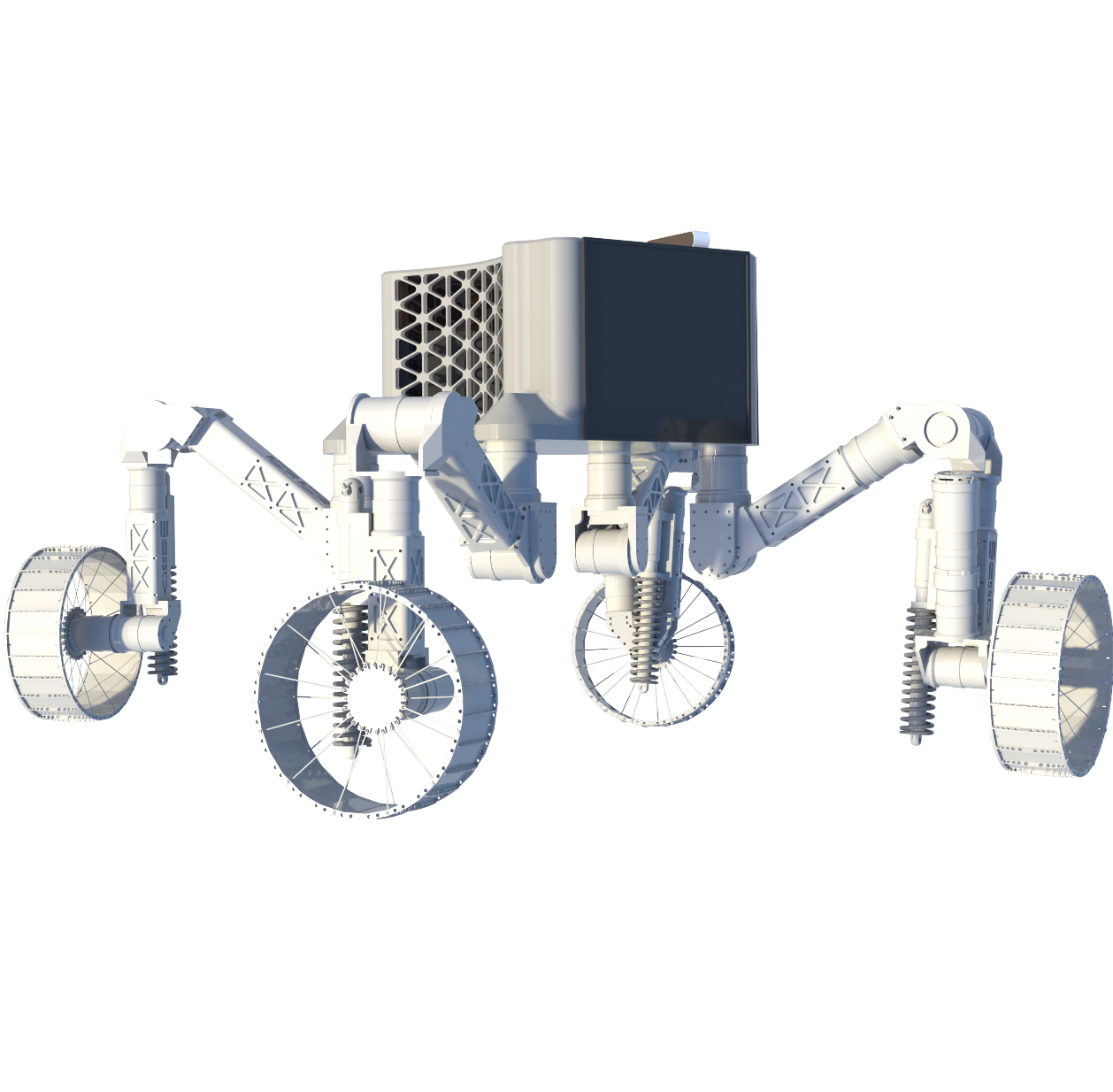
A 3D printed prototype wheel-on-limb lunar rover concept
TRAVELS (Terrapin Rover Allows Volatile Exploration on the Lunar Surface) was a highly accelerated prototype rover concept, aimed at combining the ultimate efficiency of rolling with the capability of dynamic walking to create a widely applicable locomotion platform. Four DymaFlight manipulators were initially attached to a skeletonized chassis for the initial concepts, seen in the first gallery of this webpage. Placing the wheels at joint 5 allows for full control of wheel position, caster, camber, and steering within all steering conditions, and having 7DOF arms at the front allows for the front limbs to become dual purpose as scientific investigators, sampling arms, and anchor-placement devices.



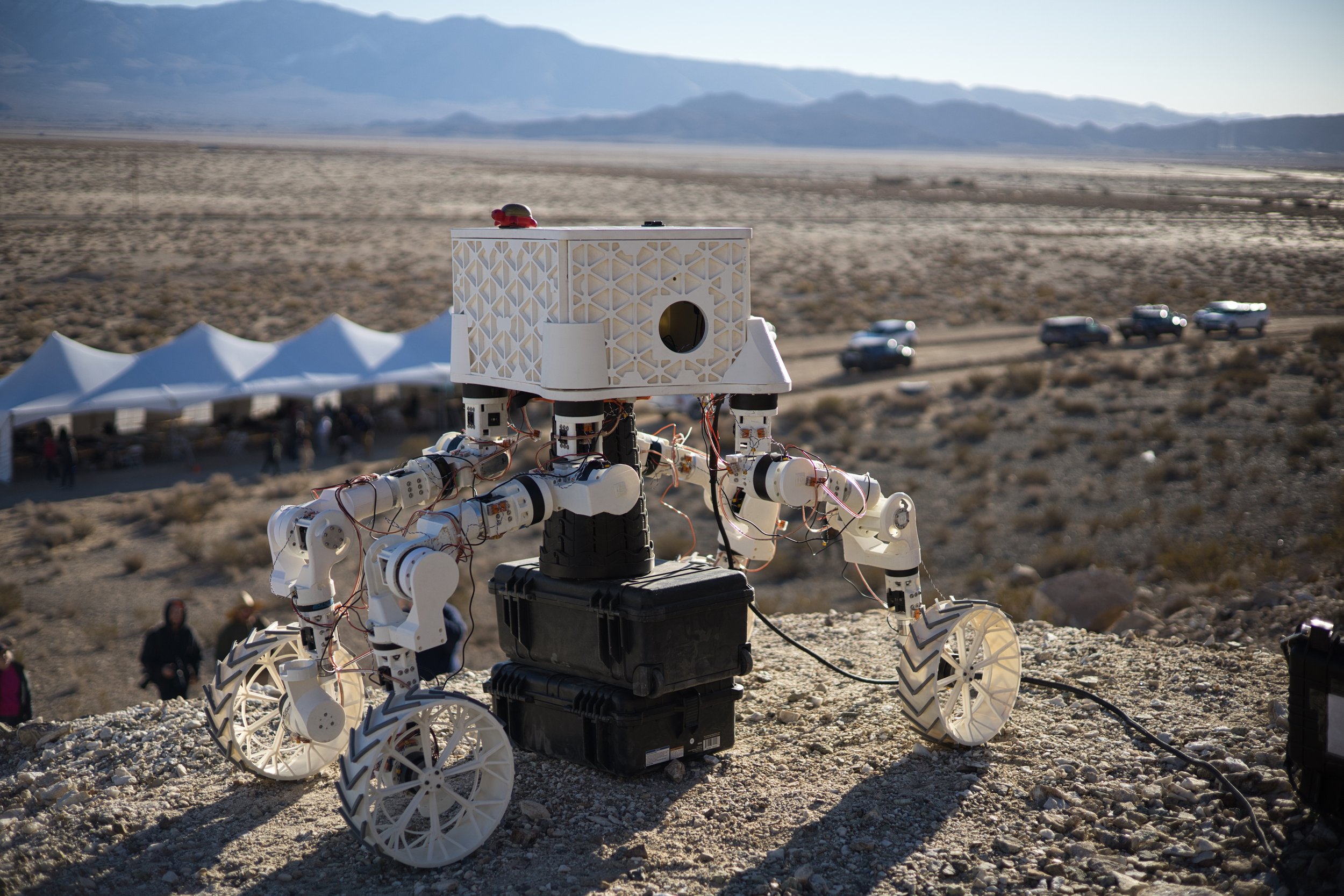
We were awarded the BIG Idea contract in March 2022, and desert testing occurred in November 2022 - a very short timespan for iterative testing and improvements for a very small team. The core team consisted of 8 students:
Joshua Martin - Team and Software Lead
Myself - Hardware, Fabrication, and Assembly Lead
Nick Bolatto - Hardware, Fabrication, and Assembly
Dan Gribok - Electronics and 3D Printing
Romeo Perlstein - Software and Motor Interfacing
Rahul Vishnoi - Software and Motor Interfacing
Chris Kingsley - Hardware Iteration Design
Nick Limparis - 3D Printing, Fabrication, Assembly, and Electronics
Dr. Akin - PI
These photos are from our test day in the California desert during the BIG Idea Forum!







The original design with DymaFlight arms, while of perfect scale and torque capability for our needs, would be too costly, too hard to drive, and too difficult for beginning engineers and students in our lab to use/build/maintain. A secondary approach was taken, creating a design for a 3D printed manipulator with identical DH parameters that was lighter and utilized as many COTS components for the drivetrain as possible.
Ultimately the X8 and X6 series of motors from MyActuator were selected as the main drive motors due to their compactness, command protocol over CANopen, integrated motor driver, gearbox, and motor all in one. We made an estimation script to optimize what motors would go in which joints with different series of gearboxes to find the best balance of weight in each position with torque required. While powerful, the MyActuator sets did not provide enough torque in each joint, and a set of secondary gearboxes were selected. High-torque capable gearboxes, the MAXPlanetary System from REV Robotics, were found and included in the second iteration of the 3D printed arm. While torque along the main axis of the gearbox was very high, out-of-plane torques could not be handled well by the gearbox and additional support bearings were included at each joint with a gearbox after the placement analysis of gear-ratios required at specific joints was completed.
Final Competition Video:
TRAVELS Assembly Video:


Moonyard Testing Video:
BIG Ideas Initial Submission Video:

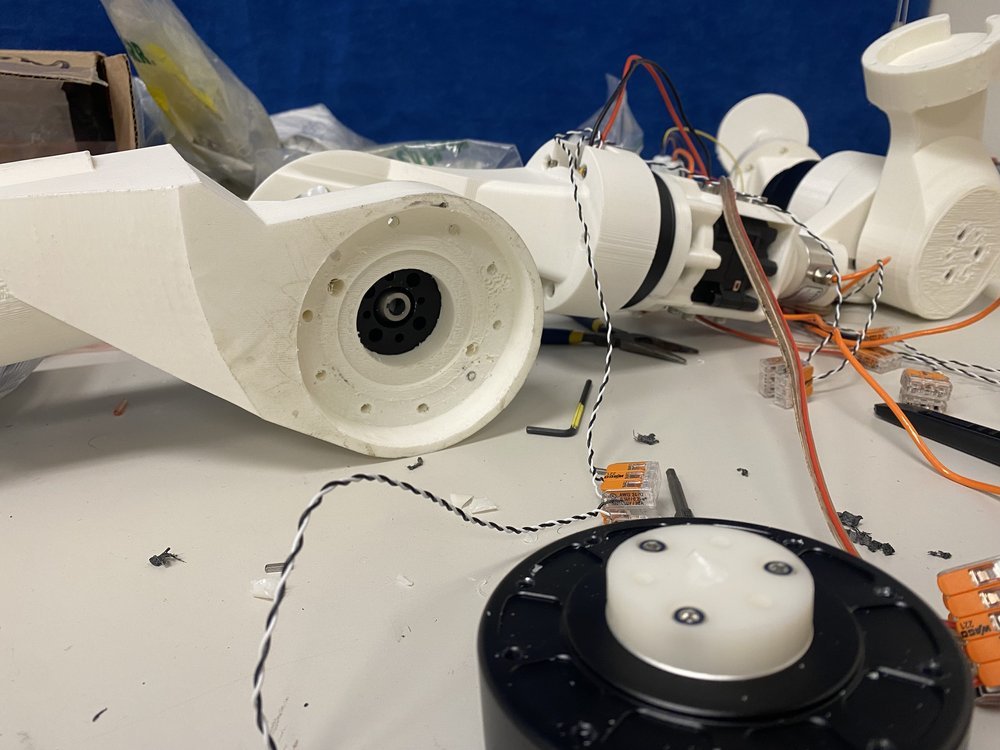
With the main design for each of the arms completed, the first assembly efforts began. As pieces had minor issues in fit, alignment, or interference a few parts had minor changes made and re-printed, but by far the greatest persisting issue with the robot was the power transmission shafts in the gearboxes. Each actuator gearbox was comprised of 4 parts:
The MyActuator motor with an output plate
A keyed input adapter from the MyActuator motor into the REV gearbox
The REV Gearbox set
An output hex shaft to the next joint with a bearing fit







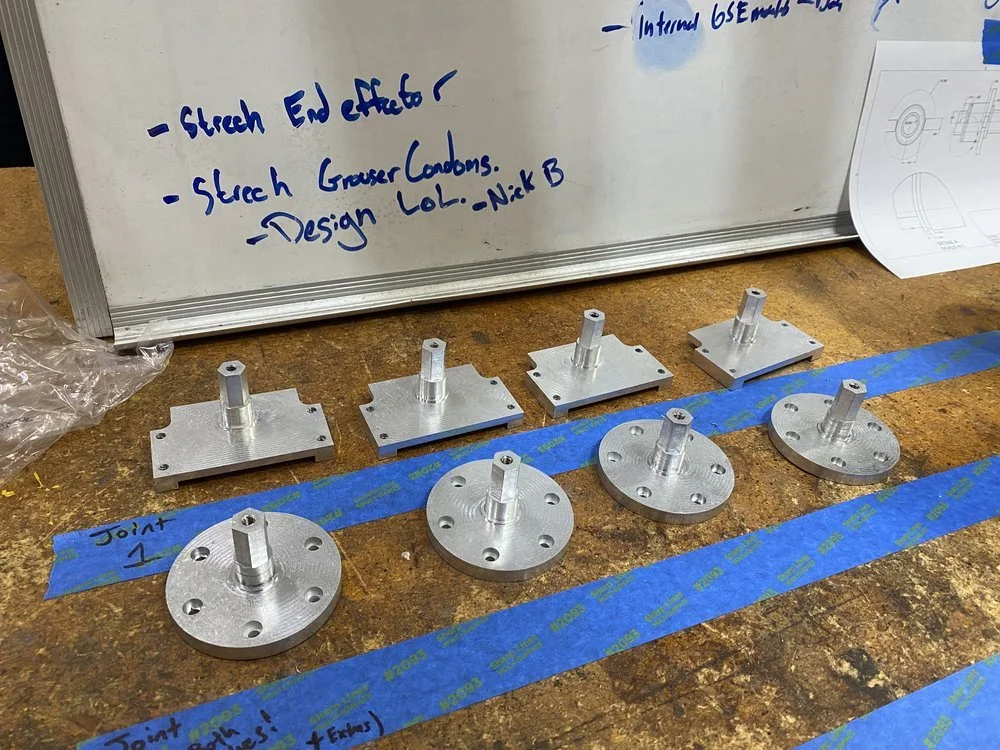
The shafts interfacing between the RMD motors and the REV gearboxes were originally printed from resin, but failed early due to cracking. An evolution followed of FDM printing in varying materials, orientations, and geometries including:
PLA
PLA+
Carbon fiber PETG
100% Infill carbon fiber PETG with oriented at printing for most torsional resistance
However these continued to fail, with incrementally better resistance until Nicolas and I decided to machine the shafts from aluminum as an end solution.










TRAVELS was the fastest progression through ideation to design, iteration, manufacture, build, test, disassemble/pack, transport (in checked luggage), reassemble (in the hotel room), and field trial that I have and may ever experience.
The high-paced engineering in this project was both exhausting and highly fulfilling, leaving a lasting impression in my head, proving to myself just how much can be done quickly if we can just think of it.
Bonus pics of the travel and transit:






