
BioBot
An advanced concept for offloading life-support mass from the xEVAS spacesuits on Artemis surface missions
The Concept
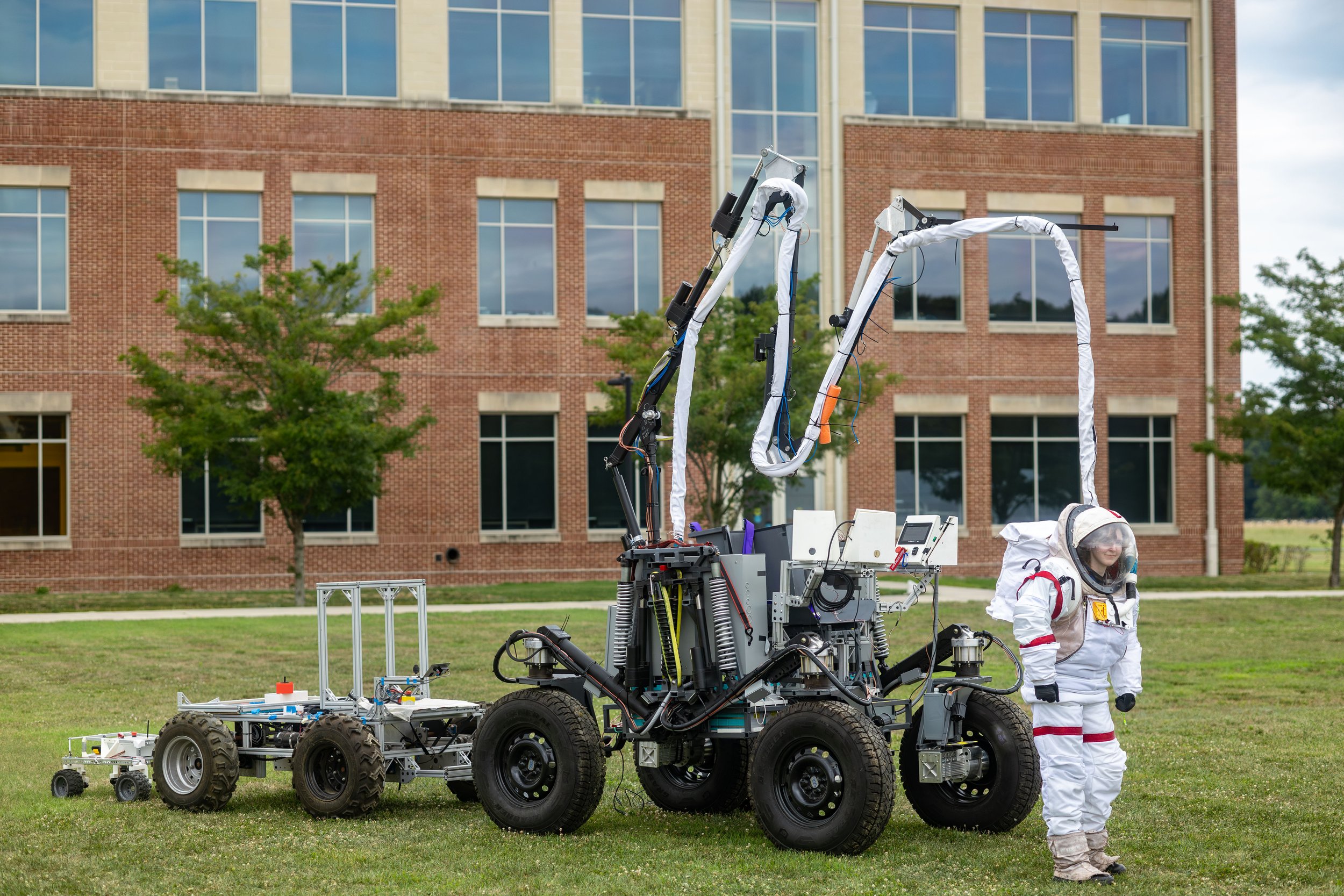
Biobot is a new approach to offloading the portable life support system (PLSS) mass off of an astronaut’s back and onto a roving vehicle. The upcoming xEVAS suits are expected to be >220% of the weight of the Apollo A7L series of suits and may cause fatigue during extended EVAs. In this concept, the astronaut would retain a small amount (this duration is currently being optimized through our field trials) of life support to allow disconnection from the umbilical to gather samples, translate into rover-unfriendly terrain, or transition to/from a habitat. The astronaut could also hop off the rover to gather samples and remain tethered, having the system follow autonomously in-suit. Each astronaut of the EVA-required buddy system would get their own rover, eliminating the walkback criteria and extending exploration radius from the habitat. BioBot as a concept is then made of three parts:
An umbilical tending manipulator (ARMLiSS)
An autonomous mobility chassis (the rover - VERTEX)
A lightweight, highly-mobile spacesuit

What Can We Do About This?
As a research institution, the SSL applied to NASA’s Innovative Advanced Concepts program (NIAC) and received both Phase 1 and Phase 2 funding to analyze, prototype, and field trial the concept on Earth and report back with guidelines, advantages, and considerations required for the concept. The VERTEX page provides an overview of the roving vehicle’s progression from lunar trade study to capability-matched Earth analogue rover in greater detail, but in essence the concept was designed for the lunar surface and then created a 1:1 scale version for testing on Earth that could climb the same slopes, support the heavy payloads, and provide an umbilical-tending robotic arm all in the 6x heavier Earth gravity. Oh, and also within our university-level budget!
I came onto the project in the beginning of the Phase 2 contract and have been the co-lead hardware designer alongside Nicolas Bolatto, and I lead the fabrication and assembly of both the rover and the arm. This was a gigantic effort from a small team, the leads of which include:
Daniil Gribok - Electronics Lead
Rahul Vishnoi - Software Co-Lead
Romeo Perlstein - Software Co-Lead
Meredith Embryo - Spacesuits
Nicholas Limparis - Electronics and Hardware Mentor
Dr. Akin - PI
So many others have contributed to the BioBot program over the years, including but not nearly limited to Chandler Sheatzley (Hardware), Spencer Quizon, Ian Welfeld, Rowan Quintero (Control Panel Study), Sam Heintz, Corbin Vorhees (Cooling backpack) and many many others including our freshman ENAE100 engineering class volunteer groups!


The Research
After welding, fabricating, assembling, and proceeding through the many subsystem checkouts that encompassed nearly three years start-to-finish, we could begin using the rover to gather data! Each of the field trials have progressed to become more involved and more data-focused as the system becomes more reliable in hardware, software, and electronics.
Three field trials have occurred so far, each of which are described below. I have also selected a few videos here that showcase the project!

Field Trial 1: UMD Campus
Our first field trial was held on the UMD campus. As this was the first time the full assembled vehicle was going to operate for an extended amount of time and had multiple test objectives to complete, the team wanted to remain within a very close proximity to our tools and high-bays incase significant repairs or recovery was needed. Luckily, the test progressed without needing recovery!
Some of the human-interface systems are still being finalized including the umbilical connection, joysticks, and ingress/egress aids alongside the software autonomy so the first field trial progressed in a series of phases. BioBot would be driven to a test site, then the operator would disembark and the arm would be manually unfolded using a joint-controller and then the astronaut would pose for photos, gather samples, etc.
While this is not how the roving system is to function for full concept simulation, this provided valuable data about vehicle operation, valuable software tools, and hardware/electrical improvements to make before the second trial!





























Field Trial 2: NASA Goddard
We were fortunate enough to have Brent Barbee from GSFC work very hard to help us gain access to the gravel track around the perimeter of the NASA Goddard site! This terrain was perfect for our second field trial as the gravel is much closer to our desired analogue terrain for the moon (fine dust). This field trial helped us address the logistical challenges in transporting the vehicle, which will very much be needed as more and more field trials occur further and further from the UMD campus.
This field trial occurred over the course of two days, the first day we used as a logistics practice and vehicle checkout day, only lasting a few hours in the afternoon to make sure VERTEX drove properly and that transportation was possible. The second day featured the umbilical-tending manipulator arm mounted to VERTEX (but was unfortunately unable to deploy due to electrical issues with encoders), and the presence of other visiting teams! We hosted the rover team from the University of Maryland Eastern Shore (UMES) to come and both see our vehicle and begin our first in-person meeting of our DREAM contract looking at multi-rover collaboration (more details below) and a small team from the UMD publicity team! Their article can be found here: https://today.umd.edu/roving-reporter
Several improvements were made to the vehicle including a stiffer suspension configuration, new stiffening members connecting the steering to the suspension swingarms, and an attempt to digitize the traction motor signals (previously using an analog joystick to drive the traction motors). All of the improvements outside of the digitization worked very well (we reverted to the analog drive system in this test), and provided a much more stable-feeling vehicle with just these minor improvements!


















Field Trial 3: UMES
The third field trial was a combined trip to UMES to both further the testing of BioBot and also work with the UMES DREAM team on the multi-rover collaboration contract we have with them! After the NASA Goddard field trial I strengthened the steering actuator housings as the camber forces from toe-in/toe-out of the wheels became too much for the helicoil threads in the aluminum steering housings. This test proved that the new improvements significantly increased the stiffness of the steering system, and the top speed of the vehicle was increased (a setting within the traction motor drivers) to ~15 mph.
During this field trial we were able to successfully exchange ROS messages containing photos and LiDAR height maps from a UMD Scout rover to VERTEX. This data will eventually be used in the VERTEX autonomy features as the small UMES rovers can drive ahead of BioBot and report back terrain conditions and path information!
UMD also brought two other roving vehicles, Raven and Scout (RyanBot), to UMES as they are ongoing projects for Sam Heintz and Ryan Mahon and they needed some field trial time!
Before the next field trial the suspension needs to be optimized a little bit more, balancing controllability of the series-elastic actuator system and operator comfort as at high speeds the ride was very bumpy! An easy fix as the suspension system redesign had adjustability at the forefront of the new requirements! Additional operational notes for the umbilical tending manipulator and electrical improvements were noted, but this was the first test where the operation of the vehicle had zero critical issues! Reliability improving!





The UMD rovers! Left to right: Biobot, Raven, and RyanBot








